(To play the video, please click on the image above)
Image: Satellite view of the Earth (source: pixabay).
(To play the video, please click on the image above)
Image: Satellite view of the Earth (source: pixabay).
All plate movements occur on the surface of the globe. Therefore, when considering plate movements, it is very helpful to deal with the geometry of plate movements, especially by looking at a sphere on which these movements take place. This is of fundamental importance for plate tectonics because it creates geometric constraints that are obvious in the plates and especially in their boundaries.
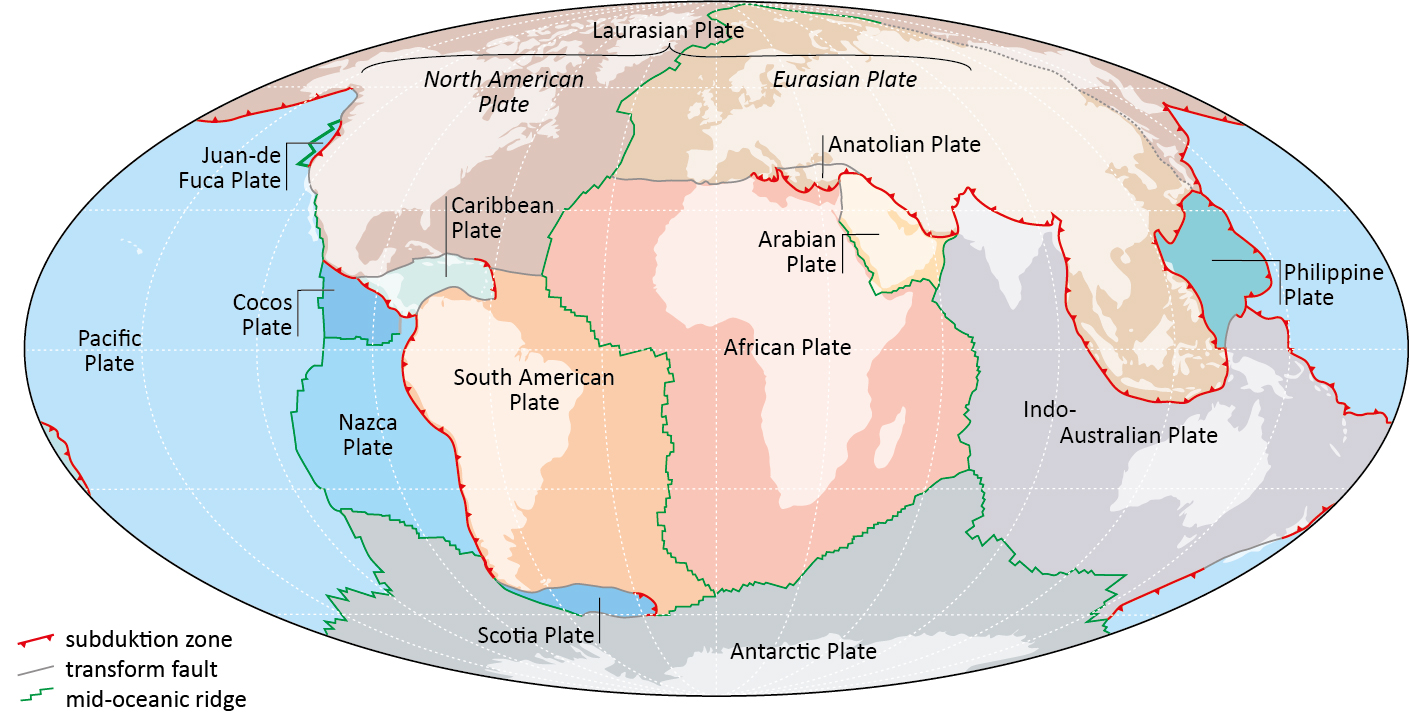
Fig.4.3.1: Global distribution of plates (from Meschede, 2018)
The spherical shape of the Earth causes all of the plates on Earth to form a closed system, as shown in Figure 4.3.1. There is no gap between two plates and yet all the plates move towards each other, away from each other and past each other in very different ways. The system must remain closed because there should not be a hole anywhere. The three different types of plate boundaries that exist are sufficient for this: divergent plate boundaries, where spreading takes place at the mid-oceanic ridges, convergent plate boundaries with subduction zones or when two plates collide, and conservative plate boundaries with transform faults. New oceanic lithosphere is formed at spreading zones. Two plates move apart and the space that opens up between them is filled with new oceanic crust or lithosphere. But this only works if something is taken away from somewhere else on the globe at the same time, because if that didn’t happen, the globe would have to keep getting bigger. That would no longer be a closed system, but that is not possible because the Earth does not gain any mass. Earth solves the problem with subduction zones. There, oceanic lithosphere is returned to the Earth’s mantle and because we are on a sphere, we can assume that exactly the same amount of lithosphere that is formed in spreading zones worldwide is removed in the subduction zones at the same time.

Fig.4.3.2: Movements of plates (= surfaces) on a spherical surface can always be decribed as rotations. The axis of rotation is also called the Euler pole (Meschede, 2022, unpubl.).
The mathematician Leonhard Euler recognized the geometric relationships resulting from the spherical shape in the 18th century. Euler discovered that all movements of surfaces on a spherical surface can be described as rotations.
No matter how you move the area on the sphere, you can always find an axis of rotation around which the area was moved – like in Fig. 4.3.2 around the axis of rotation clockwise. The graticule that can be seen here does not correspond to the Earth’s geographical coordinate system with which we determine our positions, i.e. longitude and latitude. It is a graticule that belongs only and exclusively to this axis of rotation. If you were to move the same area in a different direction, the axis of rotation and the associated graticule would be different. The pole of rotation is also called the Euler pole after the mathematician Leonard Euler.
We can simply view the Earth’s lithospheric plates as areas on the surface of the sphere. A very simple system includes half a sphere, with the two hemispheres moving in opposite directions to each other. In the animation you can see how the plates move away from each other. The two arrows indicate the movement. A gap forms between the two plates, creating a spreading zone. Plate A moves to the right, plate B to the left. But if we continue to follow this movement up and down along the black line, we come to a point where this is no longer true. The plates, which represent hemispheres, must remain on the surface of the sphere. This means that the same surface that is created from the gap that opens as a result of moving apart must be removed on the other side of the sphere. This happens by pushing one over the other; on the globe these are the subduction zones. And this makes the principle behind it clear:
If spreading zones open up in one place, there must be a removal somewhere else, i.e. the formation of subduction zones, so that the basic condition that the sphere must always remain completely covered with surfaces is fulfilled.
And something else stands out: the velocity of plate movement varies.
It is equal to zero at the pole of rotation, because there the movement changes from extension to subduction or thrusting. The highest velocity of plate movement is achieved at the so-called rotational equator. This means that plate movement velocities change systematically along the same plate boundary. These are the relative plate movement velocities, i.e. we always look at the movement between two neighboring plates at a very specific point. For example, the Pacific Plate is moving towards the Japanese northern island of Hokkaido, which lies on the Eurasian Plate, at a velocity of 9 cm per year. This value only applies there. If I go further north and stay in the same subduction zone between the Pacific and Eurasian plates, it changes. And this change in velocity is related to the rotational movement of the plates.
Fig.4.3.3 (Animation): Two-plate model: each plate covers a hemisphere. At the line they move away from each other, but only up to the common pole of rotation. On the other side it is the other way around, where they move towards each other. (Meschede, 2022, unpubl.).
The animation in Fig. 4.3.4 shows a slightly more complicated two-plate model; the transform faults are included here as additional geometric elements, the principle of which has already been explained in the previous chapters 4.1 and 4.2. They only extend from segment to segment, but not beyond that. At the transformation points, the movement is transformed from a divergent, as in the figure on the right, or a convergent, as in the figure on the left, into a lateral movement.
Here too, two plates that move in different directions on the sphere always have a common pole of rotation. It is important that this pole of rotation only applies to this pair of plates. There are therefore a large number of poles of rotation on Earth, with its many large and small plates, depending on which pair of plates you are looking at.
Both the rotation equator and the rotation pole have nothing to do with the geographical equator and the north or south pole, which result from the rotational movement of the globe as a whole. This is a constructed reference system with a pole and equator that only applies to the two plates whose movement between them is currently being considered. For example, if you look at the South American and African plates, then these two plates have a common pole of rotation which is located at just under 60°N latitude near the southern tip of Greenland and correspondingly the rotation equator is 90° away from it and is located at approximately 30° south of the geographical equator.
Fig.4.3.4 (Animation): Movements of plates on a spherical surface can always be described as rotations. Two plates that move toward or away from each other have a common pole of rotation (Meschede, 2022, unpubl.).

Fig.4.3.5: Geometry of three plates adjoining each other with different types of plate boundaries (from Frisch & Meschede, 2021).
Figure 4.3.5 shows a system with three plates that all move against each other. Of course, all movements are rotations, namely around the rotation axes, which only apply to one pair of plates. The green plate C moves away from the red plate B at the bottom. On the other side of the pole of rotation, however, there is a subduction zone. It is the same between the blue plates A and B. On the left is a spreading zone and on the other side of the rotation pole there is a subduction zone. You can clearly see that the individual plate boundaries can be aligned very differently, but they still belong to a common system. And you see that this is how all the plates on Earth relate to each other. And when there are major changes in the direction of plate movement, such as the collision between India and Eurasia over 40 million years ago, then the geometric effects can be noticed across the entire Earth.




![]()
©2022 Deutsche Geologische Gesellschaft - Geologische Vereinigung